高速ビジョンを用いた高機能3Dプリンティング
近年の3Dプリンティングの普及に伴い,その応用は自動車産業から小規模・個人製造まで幅広く議論されている.
一般的に,3Dプリンティングプロセスとして積層造形が用いられている.
このプロセスでは,ある層の欠陥が次の層に広がりやすく,最終製品全体の品質を劣化させる.
したがって,広い作業スペースを維持しながら3Dプリンターの品質を確保するためには,プロセスをオンラインで監視することが重要である.
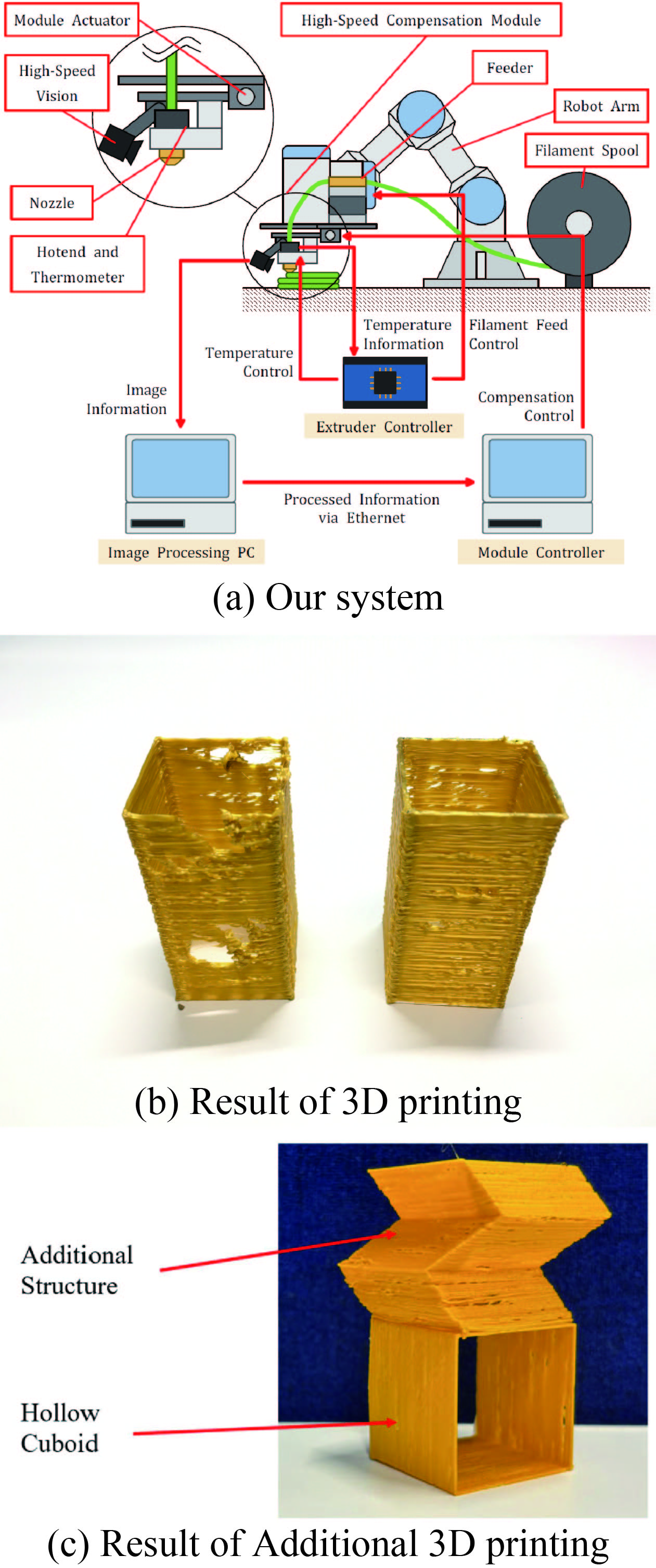
本研究では,産業用ロボットアームに取り付けた動的補正モジュールを介して,溶融堆積モデリングに粗目から細目への戦略を実装し,印刷監視と補正のために3Dプリンタ固有のマルチROI画像処理手法を提案している.
動的補正モジュールは,2台の高速度カメラ,吐出部,2軸アクチュエータから構成され,高速なサブシステムとしてメインシステムの動きを補正するために,以前に印刷された材料を監視することができる.
開発したシステムの評価として,マルチROI法を用いた欠陥検出試験と動的補正ツールのパスプランニング試験を行った.
その結果,開発した3Dプリンタシステムの動的補償により,動的補償システムが適用可能であること,マルチROI法を用いることで予測と検査が同時に行えることを示した.
References
- Taohan Wang and Yuji Yamakawa: Enhancing precision in 3D printing for highly functional printing with high-speed vision, The International Journal of Advanced Manufacturing Technology (2024) [link]
- 安辰晟, 村上健一, 平野正浩, 山川雄司: 高機能3Dプリンティングのための動的補償システムの開発と評価, 日本機械学会論文集, Vol.89, No.928, Paper No.23-00191 (2023) [link]