研究概要
高速ビジョンを中心として各種センサをネットワーク上に接続し,
センサネットワークシステムを構築することにより実世界を高速かつ包括的に認識するとともに,
アクチュエーションシステム(ロボット等)へとリアルタイムにフィードバックし,
実世界との動的なインタラクション(相互作用)を実現する高速知能システムの開発を目指しています.
現在は,次のような領域で研究開発を進めています.
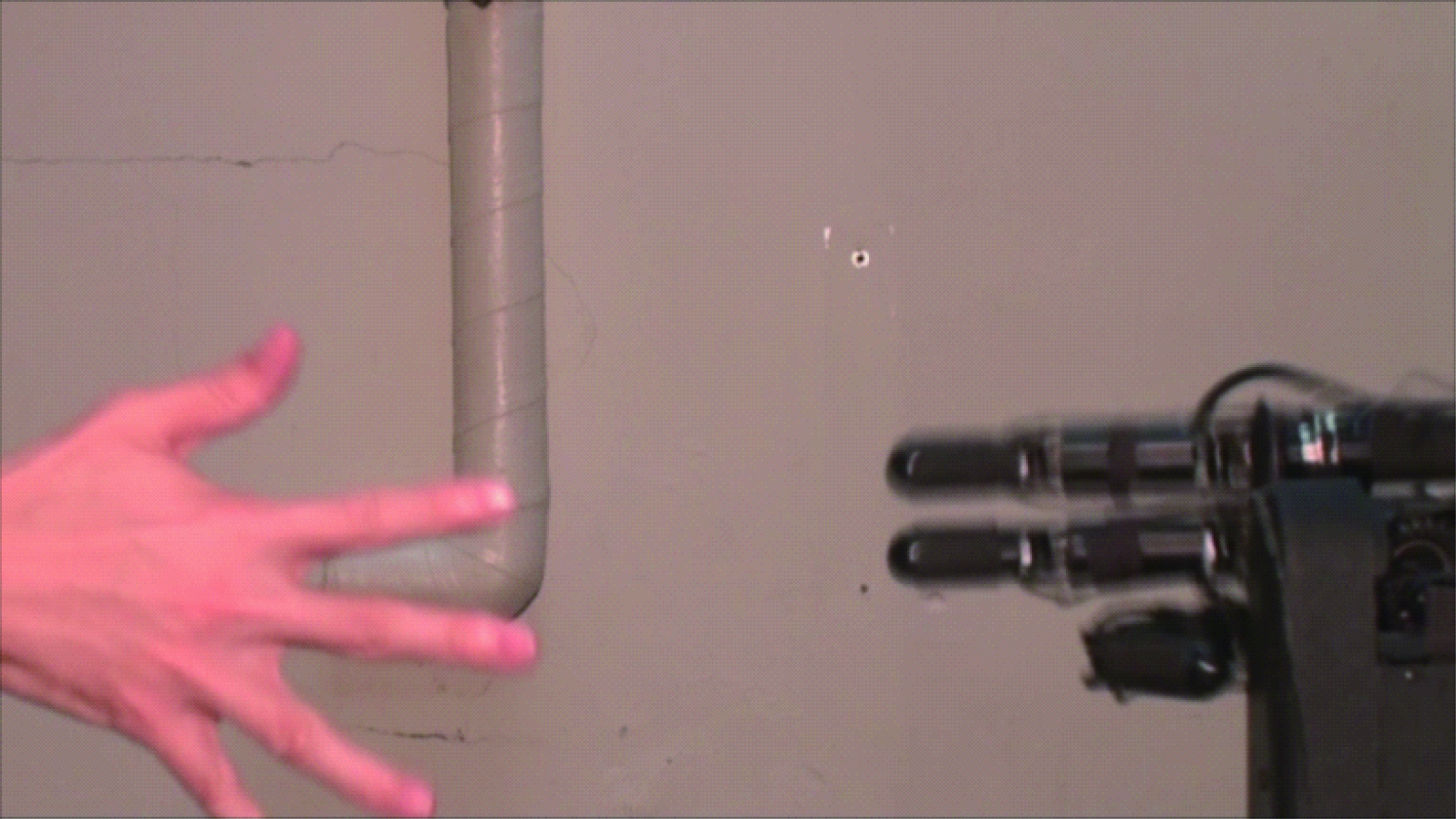


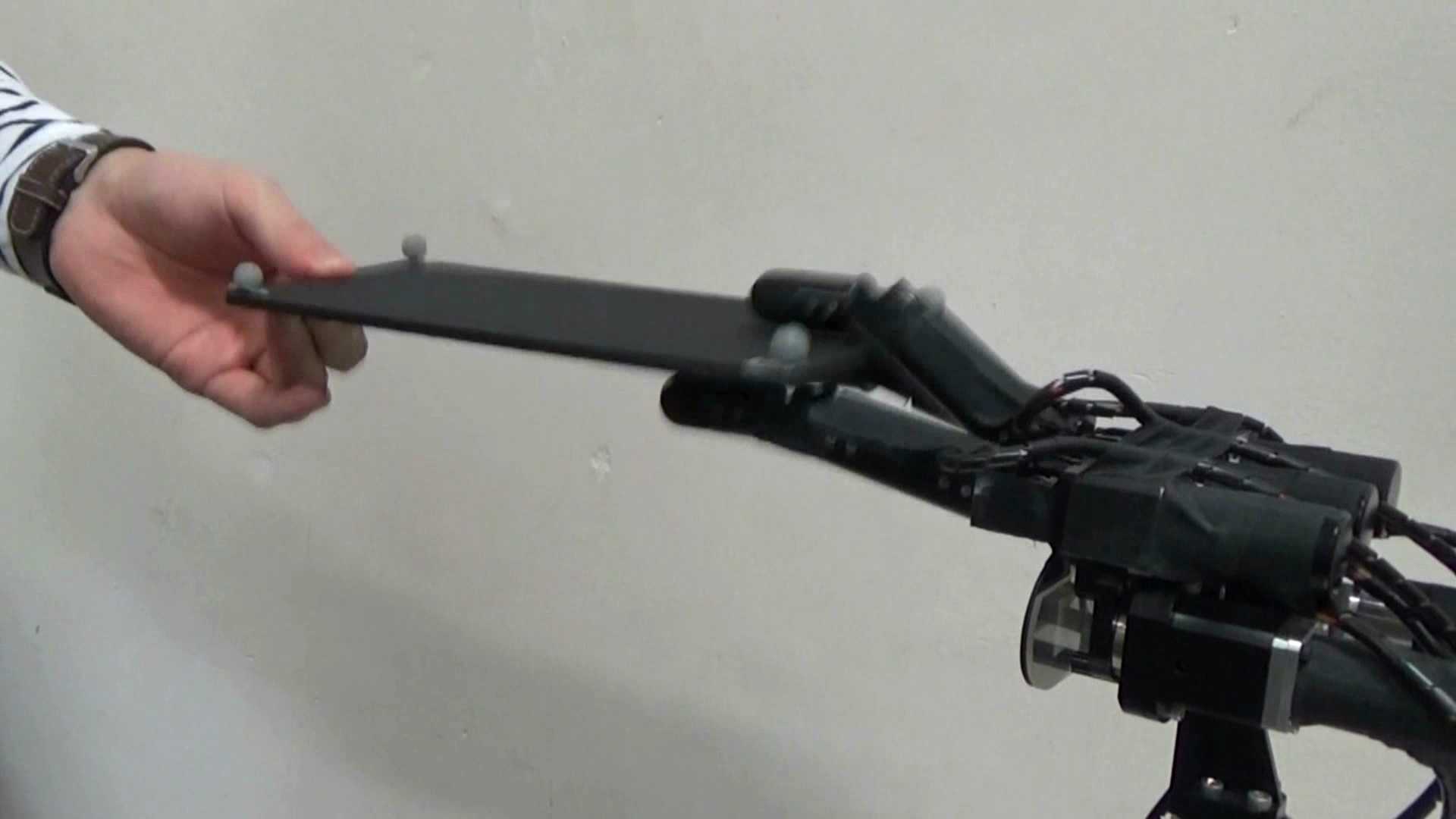

- 柔軟物体マニピュレーション
- 人間機械協調
- 高速センサネットワークシステムとその応用
- 高速ビジョンのITS応用
- 高速ビジョンの検査応用
- 高速ハンド・アームシステム
- Dynamic Compensation (動的補償)
- 移動ロボット
新着情報
- 日本ロボット学会誌に, 「マルチRGB-Dカメラによる点群の幾何・色情報を用いたリアルタイムアラインメント」が掲載されました (2026年7月18日).
- Robotics: Science and Systems 2026でのワークショップ The Geometry of Motion: Physics-Informed Structures for Learning and Controlにおいて, 「Riemannian Active Counterfactual Motion Charts for Risk-Aware Robot Motion Generation」を発表しました (2026年7月17日).
- EuroHaptics 2026において, 「C2-MGP: High-Sensitivity Stiffness Map Generation via Continuous Patterns and Convolutional Neural Networks」を発表しました (2026年7月8日).
- Scientific Reportsに, 「Effect of control frequency on closed-loop electrical muscle stimulation for biceps-triceps in healthy participants: a pilot study」が掲載されました (2026年7月7日).
- ロボティクス・メカトロニクス講演会2026において, 「模倣学習と残差方策学習からなる二段階強化学習による人間ロボット協調型長尺柔軟物動的操作」, 「ロボットアームによるけん玉「ふりけん」実現に向けた要求運動性能を緩和する軌道生成」, 「組立作業における骨格推定とイベントカメラによる欠落フレームの補完」, 「マルチRGB-D カメラによる,リアルタイム人間骨格推定」を発表しました (2026年7月1日).
- Journal of Robotics and Mechatronicsに, 「Mechanical Ghost Palpation (MGP): Application of Ghost Imaging for Tactile Sensing and Basic Validation」が掲載されました (2026年6月20日).
- 2026 IEEE International Conference on Robotics and Automation (ICRA2026)において, 「Markerless Hand-Eye Calibration by Flange Ellipse Detection」を発表しました (2026年6月2日).
- YouTubeに新しい動画「Markerless Hand-Eye Calibration」を公開しました (2026年5月28日).
- YouTubeに新しい動画「Cooperative Catching System Based on High-speed Skeleton Tracking」を公開しました (2026年5月27日).
- Advanced Roboticsに, 「Human-robot cooperative catching with high-speed skeleton tracking and adaptive collision-free motion planning」が掲載されました (2026年4月29日).
- IEEE Accessに, 「Ground-View Event Camera-Based Velocity Estimation Enabled by Spiking Neural Networks for Ground Robots」が掲載されました (2026年4月22日).
- 博士学生3名,修士学生2名が配属されました (2026年4月1日).
- 過去の情報はこちら
YouTube
研究室チャンネルにおいて,
研究成果のビデオをアップしています.
山川研究室を志望される学生の皆様へ
こちらをご覧ください.