ダイナミック人間ロボット協調
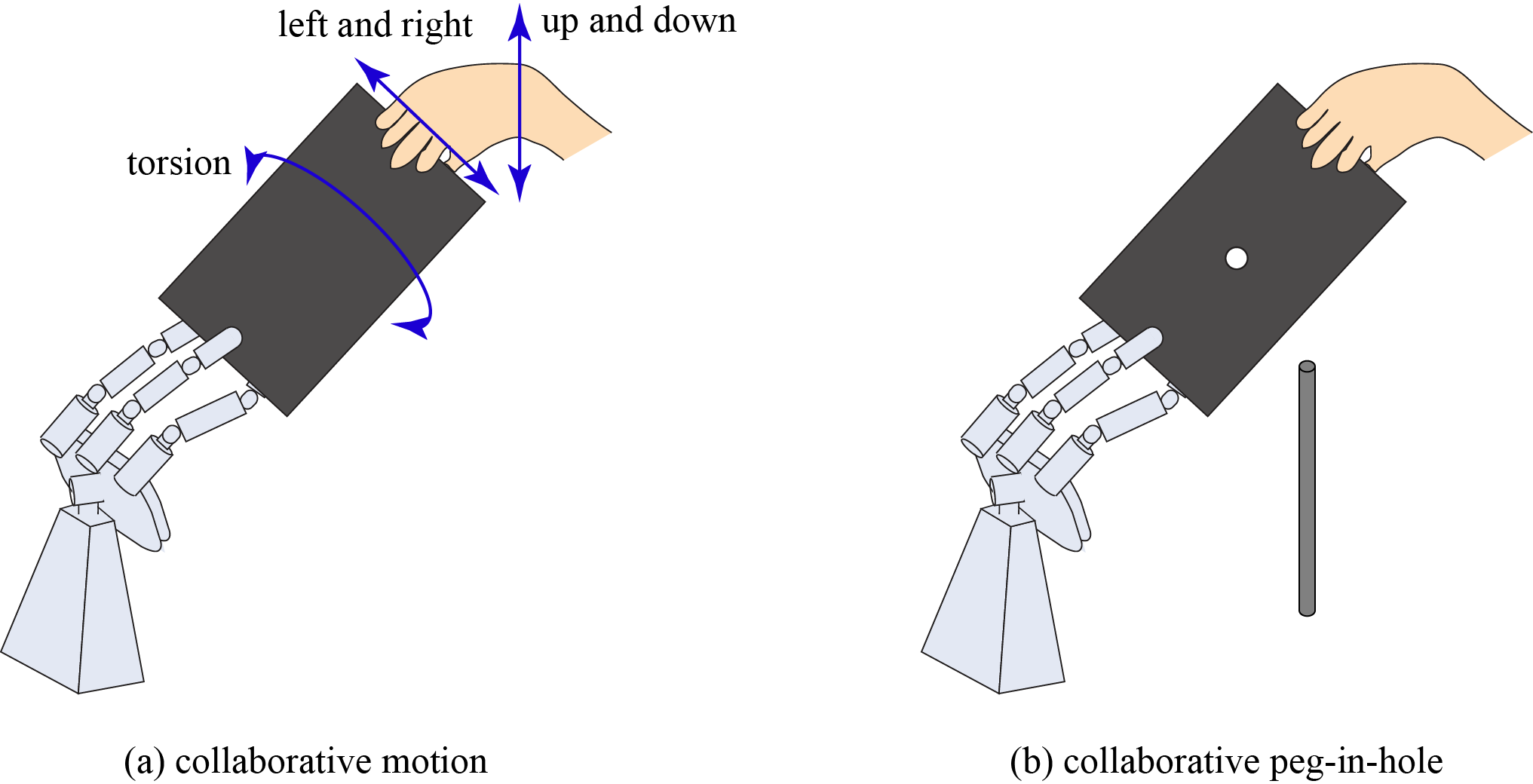
本研究では,高速ビジョンシステムと高速ロボットハンドから構成される,高速なロボットハンドシステムを用いて,人間の操作に対して高速かつ低遅延で反応可能なダイナミック人間ロボット協調システムを構築した.その上で,人間とロボットとが同一物体(本研究では板状物体)を把持し,人間の操作にしたがって協調動作(図(a))を可能にし,さらに協調動作をしたままで,高精度なペグインホールを実現した(図(b)).
具体的な方法としては,高速ビジョンシステムによって同一物体上の設置したマーカーをトラッキングすることにより,人間が操作する物体の3次元的な位置と姿勢を1ミリ秒ごとに認識している.その認識結果に基づいて,人間の意図に沿った協調動作を実現している.ここで,ロボットシステムの高速性を利用することにより,複雑な動力学計算をすることなく,運動学計算のみで実現している点が,本成果の特徴である.
具体的な方法としては,高速ビジョンシステムによって同一物体上の設置したマーカーをトラッキングすることにより,人間が操作する物体の3次元的な位置と姿勢を1ミリ秒ごとに認識している.その認識結果に基づいて,人間の意図に沿った協調動作を実現している.ここで,ロボットシステムの高速性を利用することにより,複雑な動力学計算をすることなく,運動学計算のみで実現している点が,本成果の特徴である.
動画
使用許諾は,contact
参考文献
- Yuji Yamakawa, Yutaro Matsui and Masatoshi Ishikawa: Development and Analysis of a High-speed Human-Robot Collaborative System and its Application, 2018 IEEE International Conference on Robotics and Biomimetics (Kuala Lumpur, Malaysia, 2018.12.15)/Proceedings, pp.2415-2420 (2018)