Research Concept
By connecting various sensors on the network, centered on high-speed vision,
we construct sensor network systems to quickly and comprehensively recognize the real world.
Then we also feed back to actuation systems (robots etc) in real time.
We aim to develop high-speed intelligent systems that realize dynamic interaction.
Currently, we are pursuing developments and researches in the below research field.


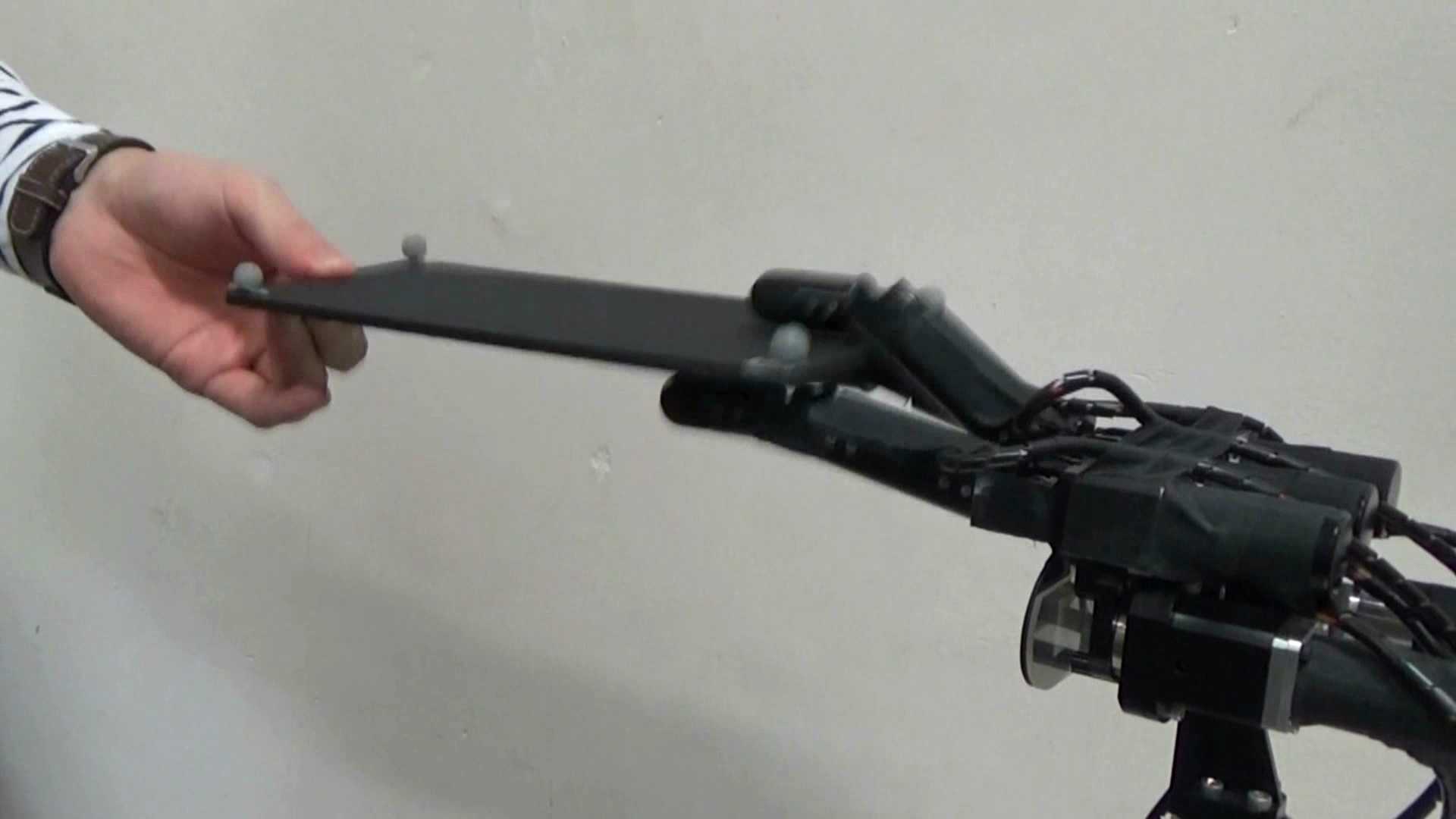

- Flexible Object Manipulation
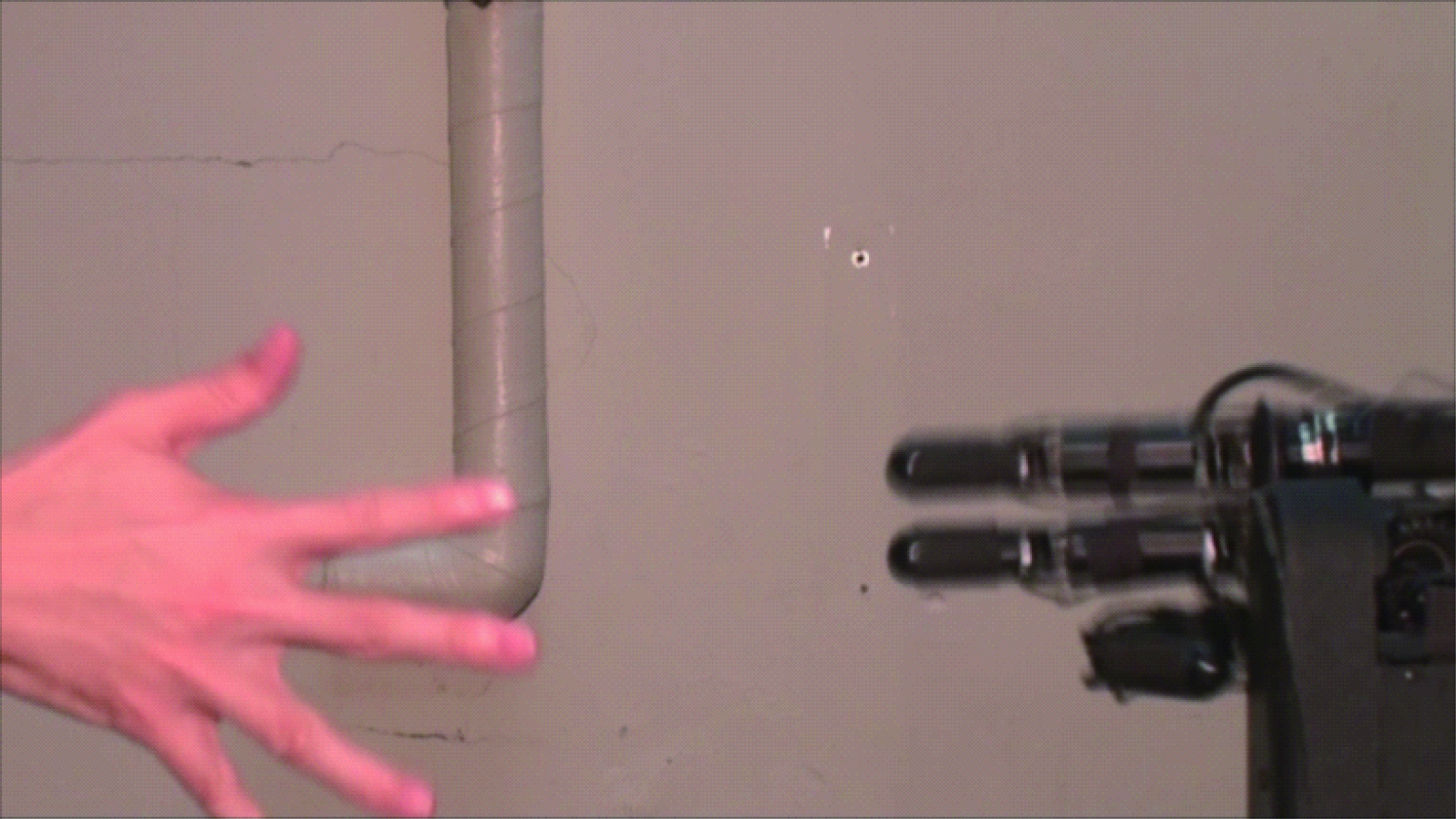
- Human-Robot Cooperation
- High-speed Sensor Network System and Its Applications
- ITS Application of Hih-speed Vision
- High-speed Hand and Arm System
- Dynamic Compensation
- Mobile Robot
YouTube
In our laboratory channel,
videos on research results are uploaded.
To students who want to study in the Yamakawa Laboratory
Please refer to the page for more details.