MAFiD (Mutual Assist tracker of feature Filters and Detectors)法による高速物体追跡
視覚システムにおける物体検出・追跡は,コンピュータビジョンの基盤技術であり,様々なアプリケーションで利用されている.
特に,高速カメラを用いた物体追跡は,ロボットにおけるリアルタイム制御への応用が期待されている.
そのため,追跡速度と検出精度の向上が求められている.
しかしながら,その両方を同時に実現することは困難とされている.
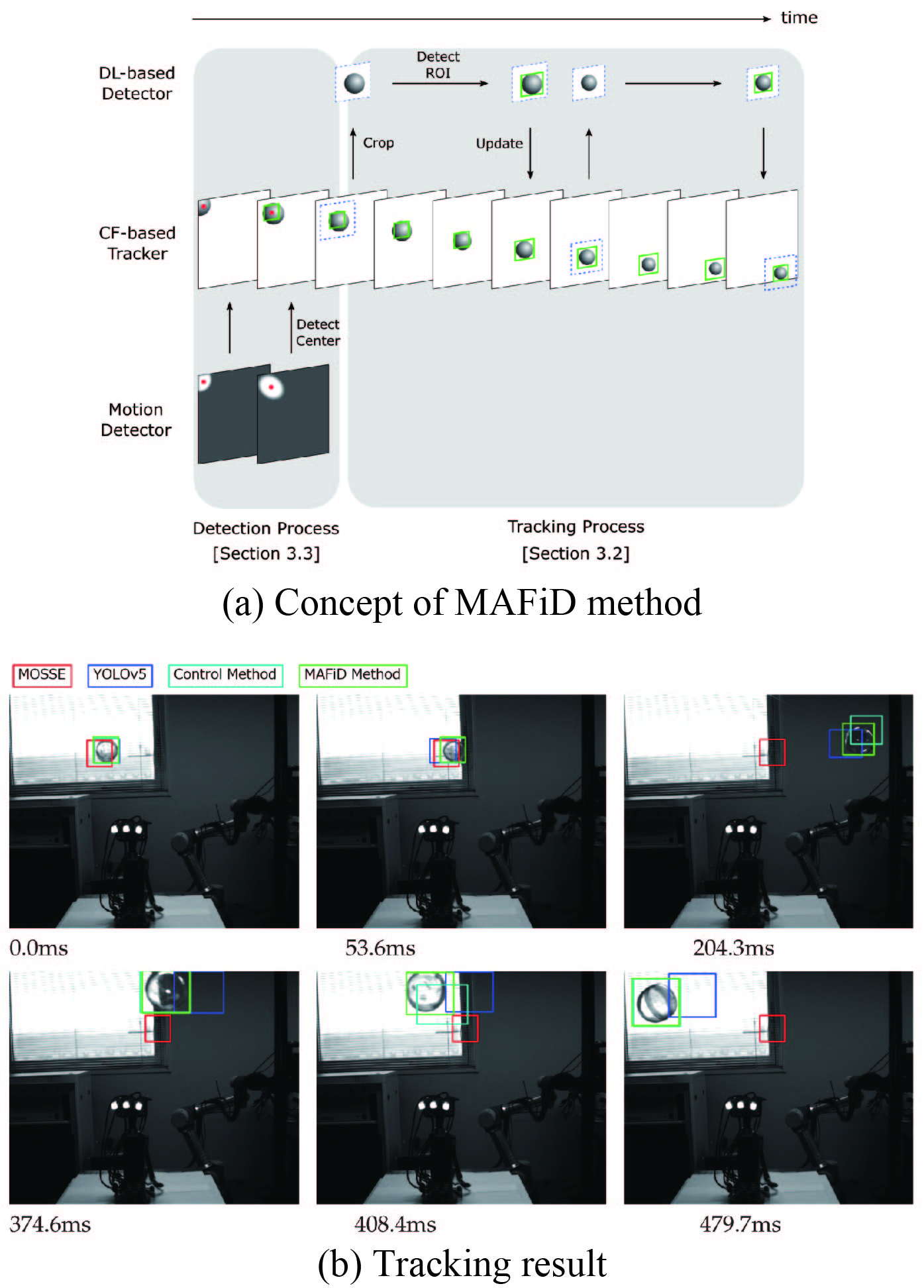
そこで本論文では,相関フィルタによる物体追跡,ディープラーニングによる物体検出,背景減算による動き検出といった複数の手法を組み合わせた追跡手法を提案する.
これらのアルゴリズムは並列に動作し,互いの処理を補助することでシステム全体のパフォーマンスを向上させている.
この提案手法を``Mutual Assist tracker of feature Filters and Detectors (MAFiD method)''と呼んでいる.
本手法は,移動物体の高速追跡と高検出精度の両立を目指しており,高速で移動する透明カプセルを追跡し,検出性能と処理速度を検証する実験を行った.
その結果,Intersection over Union(IoU)において検出精度は86%で,追跡速度は618fpsであった.
また,検出レイテンシは3.48msであった.
これらの実験スコアは従来の手法よりも高く,提案手法MAFiDが高い検出性能を維持しながら高速な物体追跡を実現したことを示している.
References
- Akira Matsuo and Yuji Yamakawa: High-Speed Tracking with Mutual Assistance of Feature Filters and Detectors, Sensors, Vol.23, Issue 16, Article No. 7082 (2023) [link]