Recognizing and Picking Up Deformable Linear Objects Based on Graph
Manipulating deformable linear objects (DLOs) presents significant challenges, particularly in industrial applications.
However, most previous research has primarily focused on the manipulation of single DLOs, leaving the problem of picking up stacked DLOs without causing collisions largely unexplored.
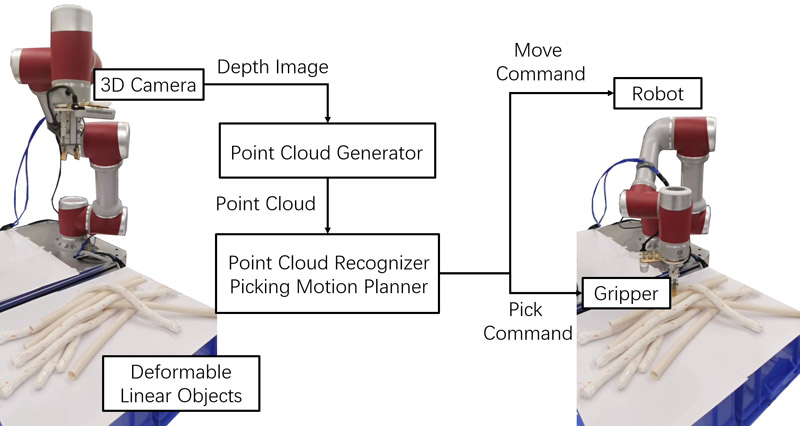
This paper introduces a novel strategy to address this issue using a simple setup with only a depth sensor.
The proposed approach begins by acquiring a point cloud of the scene.
The supervoxel method is then employed to segment the points into several clusters.
Based on these clusters, a graph is constructed and pruned by graph theory to search for DLO axes.
The axes belonging to the same DLO are subsequently connected, and occlusion relationships are identified.
Finally, the best target, optimal picking point, and motion planning strategy are evaluated.
Experimental results demonstrate that this method is highly adaptable to complex scenarios and can accommodate DLOs of varying diameters.
References
- Xiaohang Shi and Yuji Yamakawa: Recognizing and Picking Up Deformable Linear Objects Based on Graph, Journal of Robotics and Mechatronics, Vol.37 No.2, pp.335-347 (2025) [link]