グラフに基づく線状柔軟物体の認識とピックアップ
変形可能な線形物体(Deformable Linear Objects, DLOs)を操作することは,産業用途において重要な課題である.
しかし,これまでの研究の多くは,主に単一のDLOの操作に焦点を当てており,衝突を起こさずに積み重ねられたDLOをピックアップする問題はほとんど扱われていなかった.
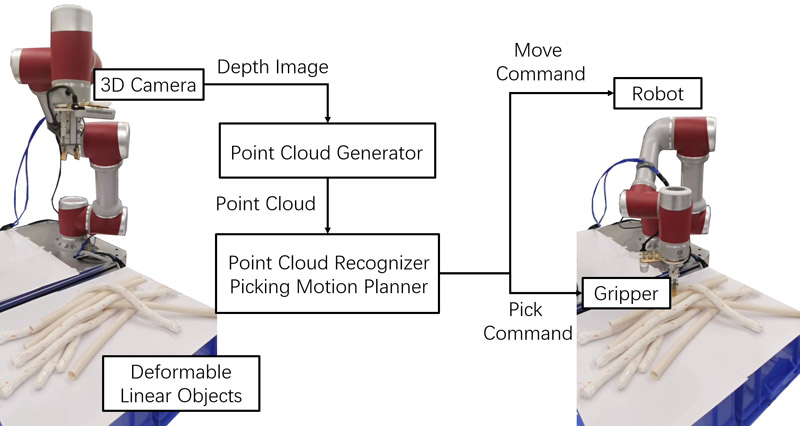
本論文では,深度センサのみのシンプルなセットアップを用いて,この問題に対処する新しい手法を提案している.
提案するアプローチは,まずシーンの点群を取得し,次にスーパーボクセル法を用いて点群をいくつかのクラスタに分割する.
これらのクラスタに基づいてグラフを構築し,グラフ理論を用いてDLOの軸方向を抽出する.
さらに,同じDLOに属する軸が連結され,オクルージョンの関係が特定される.
最後に,最適な対象物体,最適なピッキングポイント,運動計画戦略が評価される.
実験では,この方法が複雑なシナリオに適応性が高く,様々な直径のDLOに対応できることを示している.
References
- Xiaohang Shi and Yuji Yamakawa: Recognizing and Picking Up Deformable Linear Objects Based on Graph, Journal of Robotics and Mechatronics, Vol.37 No.2, pp.335-347 (2025) [link]