Real-time Occlusion-robust Deformable Linear Object Tracking
Tracking and manipulating deformable linear objects (DLO) has great potential in the industrial world.
However, estimating the object's state is crucial and challenging, especially when dealing with heavy occlusion situations and different objects' physical properties.
To address these problems, we introduce a novel tracking algorithm to observe and estimate the states of DLO.
The proposed tracking algorithm is based on the Coherent Point Drift (CPD) and Finite Element Method (FEM).
To demonstrate our method’s robustness and accuracy with occlusion, we implemented tracking experiments on deformable objects, such as rope and iron wire, and compared the results with other methods.
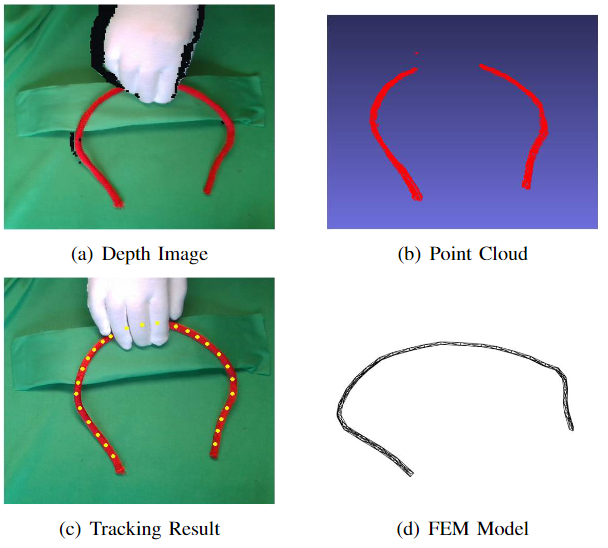
As the image shows, we used a depth camera to acquire the point cloud.
Even if some of the point clouds are occluded, we can still estimate accurately estimate the position correctly with the 3D FEM model.
Movie
If you want to use the original video, please send an e-mail for copyright permission to yamakawalabo