オクルージョンにロバストな線状柔軟物体の実時間トラッキング
変形可能な線状柔軟物体(Deformable Linear Object: DLO)のトラッキングとマニピュレーションは,産業界においても学術的にも解決すべき重要な課題であり,
特に線状柔軟物体の状態を推定することは,オクルージョンの厳しい状況やその物体の物理的性質が変化する場合,特に困難である.
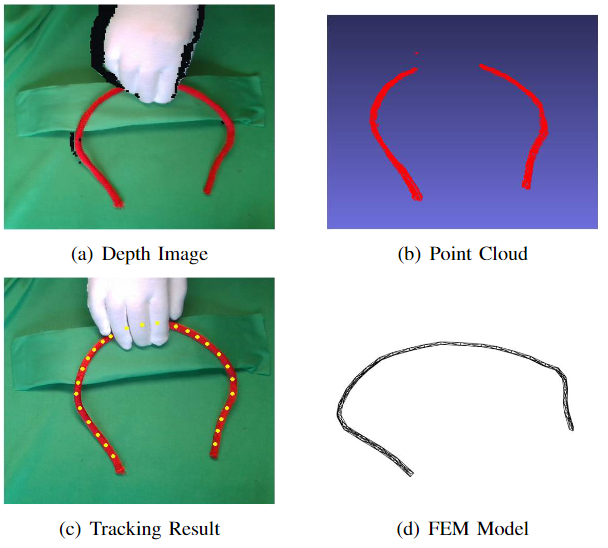
これらの問題を解決するために,本研究では新しい追跡アルゴリズムを提案した.提案するトラッキングアルゴリズムは,Coherent Point Drift(CPD)と有限要素法(FEM)に基づく方法である.
ロバスト性と精度を実証するために,ロープや鋼線などの変形可能な線状柔軟物体に対するトラッキング実験を行い,その結果,他の手法と比較し,有効性を確認した.
以下の実験結果に示すように,オクルージョンが発生しても,3次元FEMモデルで正しく状態を実時間で推定することができる.
動画
使用許諾は,yamakawalabo