One-Shot Affordance Learning (OSAL): Learning to Manipulate Articulated Objects by Observing Once
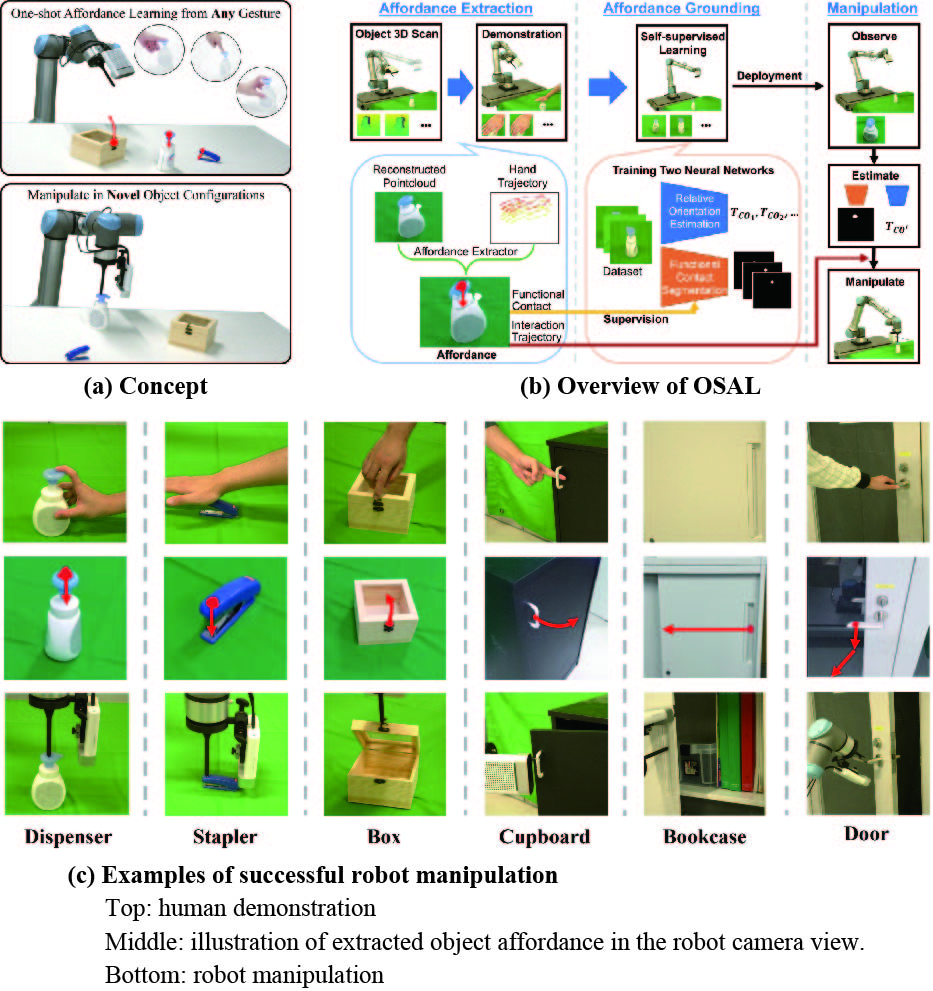
We present One-Shot Affordance Learning (OSAL): a novel robotic system that learns manipulation for articulated objects by observing human demonstration only once.
We defined articulated object affordance as an open-loop trajectory conditioned on a certain area of the object’s surface.
With such a definition, our system extracts affordance by focusing on the hand’s effect on the object.
The extracted affordance can be regarded as a low-level manipulation representation that could be easily generated into robot motion.
We further grounded such affordance into object visual features through self-supervised learning to deal with novel object configurations.
We evaluated our method on a collection of real life objects and furniture and demonstrated high success rates.
With our system, humans only need to manipulate a novel object once with any gesture to transfer that skill to the robot, which is a highly efficient and user-friendly paradigm for robotics nonexperts.
Movie
If you want to use the original video, please send an e-mail for copyright permission to yamakawalabo