Real-Time Corner Recognition, Robotic Tracking and Grasping of a Towel-like Object under Suspended Transportation
This study proposes a method for robotically grasping the corners of dynamic surface flexible objects during suspended transport.
Traditionally, grasping operations on flexible surfaces have been limited to static/quasi-static situations or when the shape of the object is predictable, and there are few studies on grasping in dynamic situations.
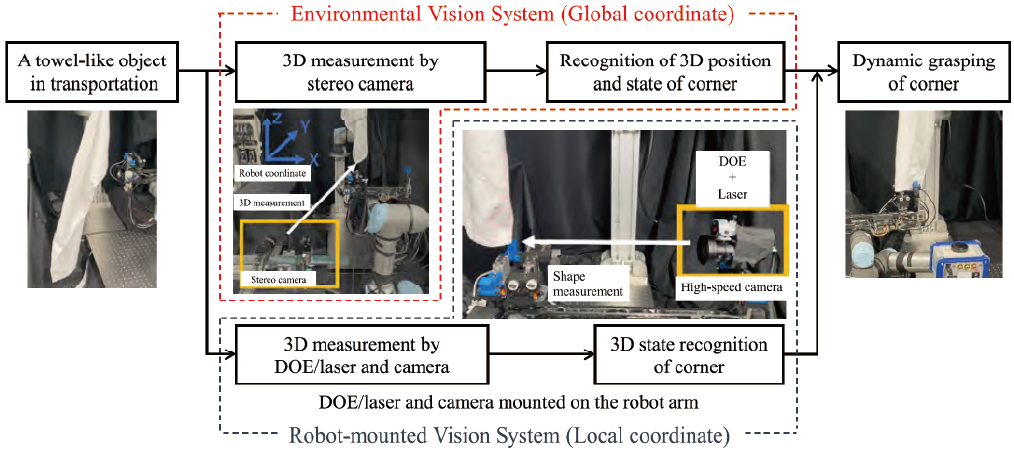
In this study, a cooperative vision system consisting of an environmental vision system with a high-speed stereo camera and a robot-mounted vision system with a high-speed camera and a laser with a DOE (Diffractive Optical Element) is newly introduced to enable grasping of dynamic surface objects.
The objective is to enable the grasping of dynamic flexible surfaces.
A real-time recognition method for the corner state of a dynamic surface flexible object using the cooperative vision system is proposed, as well as a method for tracking and grasping the corner of the surface flexible object.
As a result, the grasping execution time for a series of operations is approximately 70% faster than before, and the expected execution time until success is reduced by approximately 50%.
References
- Tomonori Murakami, Kenichi Murakami and Yuji Yamakawa: Real-Time Corner Recognition, Robotic Tracking and Grasping of a Towel-like Object under Suspended Transportation, Transactions of Society of Instrument and Control Engineering, Vol. 60, No. 12, pp. 638-646 (2024)