吊り下げ搬送下の面状柔軟物に対するコーナーのリアルタイム認識とロボットによる追跡・把持
本研究では,吊り下げ搬送中の動的な面状柔軟物のコーナーをロボットで把持する方法を提案している.
従来,面状柔軟物の把持操作は,静止/準静止状態にある場合,あるいは形状が予測可能な場合に限られており,動的状態での把持に関する研究は少ない.
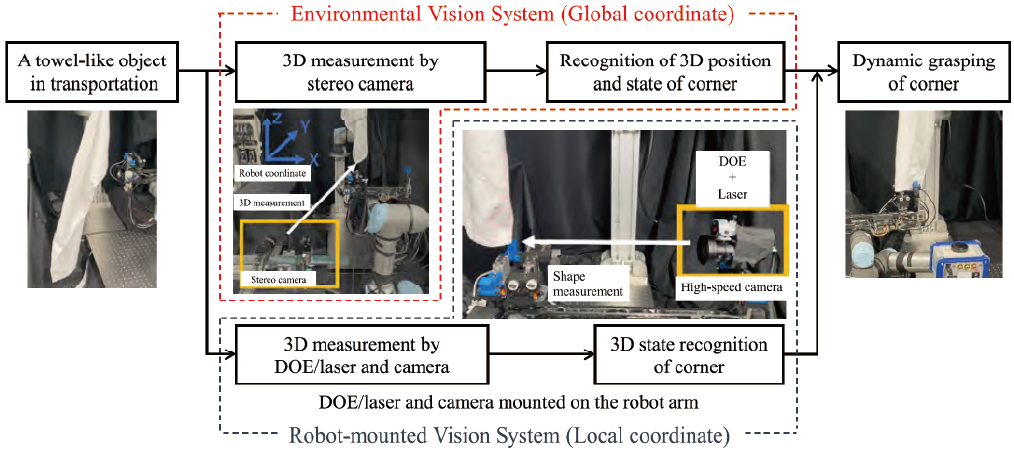
そこで本研究では,高速ステレオカメラを用いた環境設置型ビジョンシステムと,高速カメラとDOE(Diffractive Optical Element)付きレーザを用いたロボット搭載型ビジョンシステムから構成される協調ビジョンシステムを新たに導入することで,動的な面状柔軟物の把持を可能にすることを目的とする.
協調ビジョンシステムを用いた,動的な面状柔軟物のコーナー状態をリアルタイムに認識する手法を提案するとともに,面状柔軟物のコーナーを追跡・把持する手法を提案している.
結果として,一連の操作における把持実行時間は従来よりも約70%高速化し,成功までの実行時間の期待値を約50%短くさせることに成功した.
References
- 村上友規, 村上健一, 山川雄司: 吊り下げ搬送下の面状柔軟物に対するコーナーのリアルタイム認識とロボットによる追跡・把持, 計測自動制御学会論文集, Vol.60, No.12, pp.638-646 (2024)